In safety critical applications with data-driven controllers, exogenous or off-line constraints can lead to overly conservative behaviour, especially in the face of uncertainty. Control Barrier Functions (CBFs) are a well-known method to convert state constraints into hard control constraints which suffers from this problem.
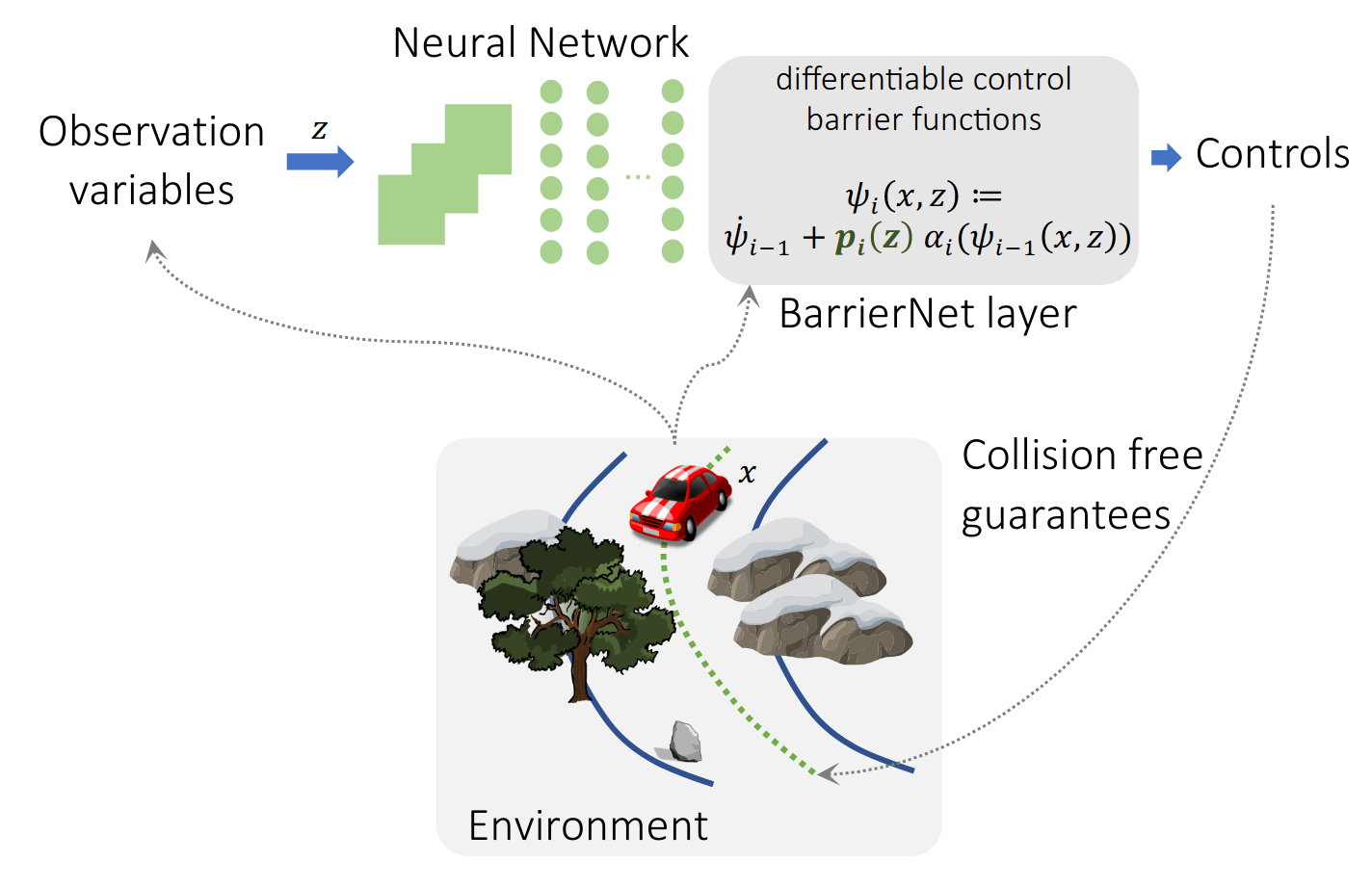
In [Xia21B], the authors introduce a differentiable version of CBFs which can be added as a differentiable layer in a neural network controller and trained with standard SGD methods, while ensuring that the constraints (for a system with known dynamics) are always met. We will stay tuned for future work attempting to also learn the dynamics and safe sets from data.